Building on the power of MBend ‘s automatic tooling and sequencing features, MRobot offers
· Fully automatic gripping and path calculations
· Interactive gripping with graphical feedback
· Manual path adjustments using control points
· Support for grippers with vacuum/clamp combinations
· Support for cells with rails
· Generation of NC code for both machine and robot
· Generation of NC code that guarantees coordinated interaction between robot and brake for smooth production
· Fast and easy cell calibration
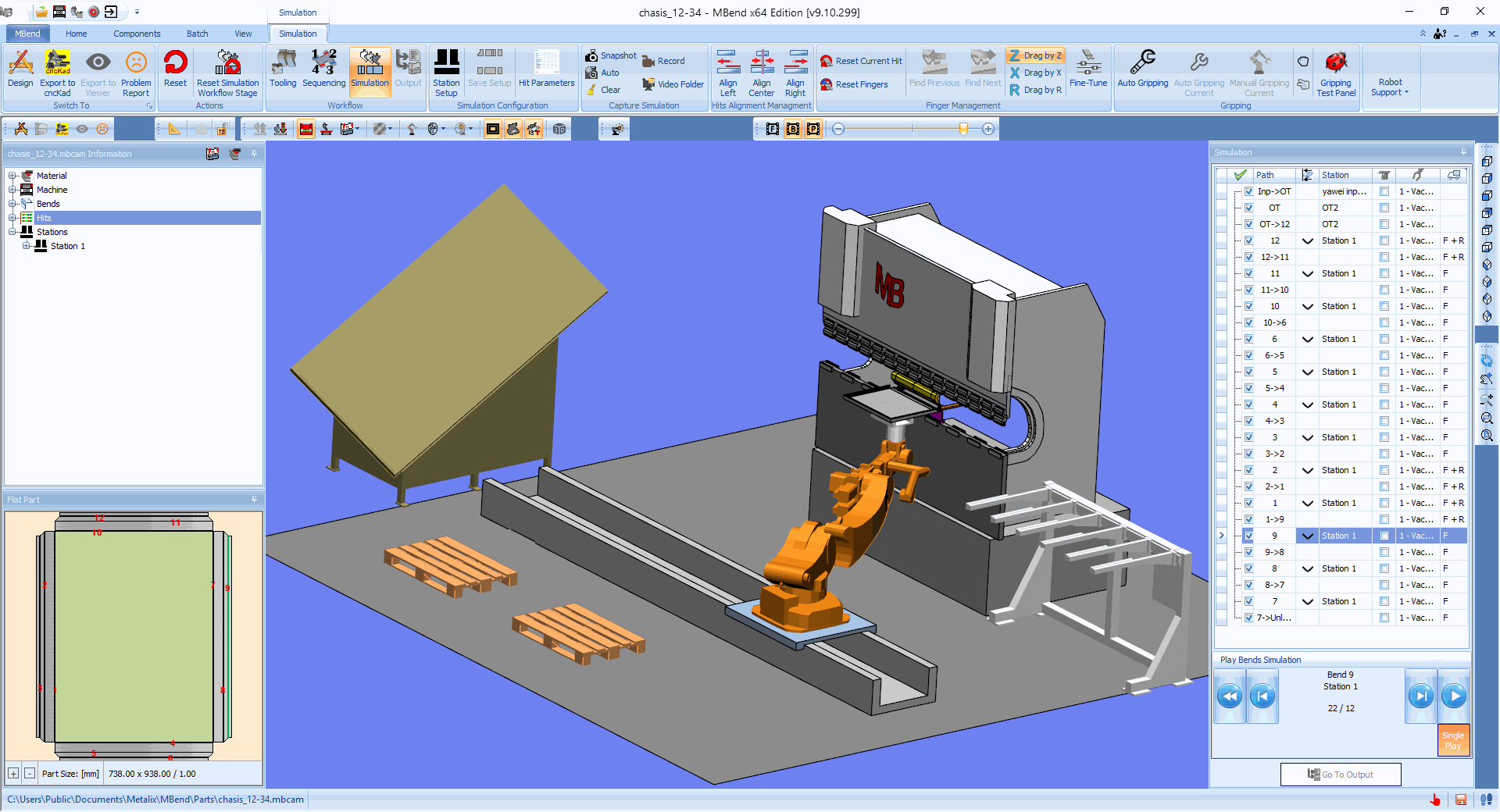
You can easily create a new bending cell by selecting components (including brake, robot and peripherals) from a catalogue of pre-configured components, as well as import new components.
Once you select your cell’s elements, you can position them according to the physical layout of your cell. You can also use MRobot to configure your cell layout, testing the validity of different positions for the various elements of the cell.
MRobot is currently compatible with Kuka®, Yaskawa®, and Fanuc® robots, with more under development. As an extension to the MBend software, these robots can interface with most press brakes, allowing great flexibility in cell management.